
1.2 document : le capteur de pare-chocs
Le robot virtuel (VR) dispose d'une multitude de capteurs, dont le capteur de pare-chocs. Il fonctionne comme un interrupteur, il signale une valeur :
| 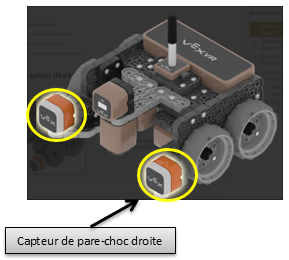 |
Pour programmer le capteur de pare-chocs : localisez la catégorie Détection. dans la boîte à outils recherchez le bloc Détection du Bumper. |  |
Ensuite vous pouvez sélectionner le pare-chocs gauche ou le pare-chocs droit dans le menu déroulant. | 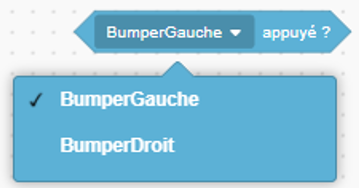 |




